Closed-Form Logit Steering
COLLINS WESTNEDGE
OCT 8, 2025
Goal
The goal is to derive the closed-form minimal perturbation to an input x that achieves any target probability p ∈ (0,1) in logistic regression.
Identities & Intuition
Model components
Sigmoid: \(\sigma(z)=\dfrac{1}{1+e^{-z}}\)
maps score to probability (e.g., \(z=0 \Rightarrow p=0.5\))Score: \(z=w^T x + b\)
linear combination of features plus bias termLogit (log-odds): \(\operatorname{logit}(p)=\ln\!\left(\dfrac{p}{1-p}\right)\)
maps probability to linear score (inverse of \(\sigma\))
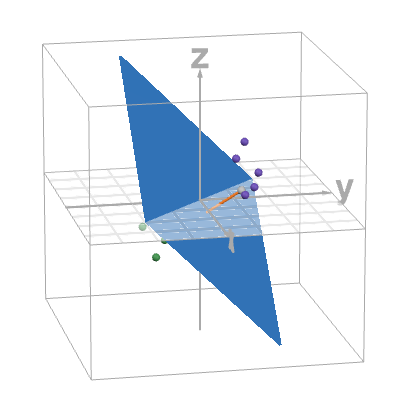
Geometry
- \(H=\{\,x\in\mathbb{R}^n:\; w^T x +
b = 0\,\}\) — decision boundary (\(p=0.5\))
- \(w \perp H\) — \(w\) is normal to \(H\)
Approach
Move \(x\) along \(w\) by some \(\lambda\):
\[ x' = x + \lambda w \] with \[ \operatorname{logit}(p) = w^T x' + b. \]
Derivation
Set up the constraint: Since the model’s score is \(z = w^T x' + b\) and we want probability \(p\), we require \(w^T x' + b = \operatorname{logit}(p)\).
Plug in \(x'\) (use \(w^T w=\|w\|^2\)):
\[ \begin{aligned} \operatorname{logit}(p) &= w^T(x+\lambda w)+b \\ &= w^T x + \lambda\, w^T w + b \\ &= w^T x + \lambda\|w\|^{2} + b. \end{aligned} \]
- Solve for \(\lambda\):
\[ \lambda = \frac{\operatorname{logit}(p) - (w^T x + b)}{\|w\|^{2}}. \]
- Substitute \(\lambda\) into \(x' = x + \lambda w\):
\[ x' = x + \frac{\operatorname{logit}(p) - (w^T x + b)}{\|w\|^{2}}\,w. \]
Final Formula
\[ \boxed{ x' = x + \frac{\operatorname{logit}(p) - (w^T x + b)}{\|w\|^{2}}\,w } \]
Where \(x' = x + \lambda w\) achieves the target probability \(p\).
Interactive Demo
Open interactive visualization →
Applications
- counterfactual creation ?
- debiasing / concept erasure ✓
- hard negative mining ✓